virtual commissioning
Virtual commissioning technology can greatly reduce the post-project commissioning time. Through the pre-digital technology, it is intended to carry out equipment actions, program movements, problems, and production line bottleneck inspections in a virtual environment, so as to provide sufficient guarantee for post-project implementation and risk control. CAE is used /CAM/digital factory/VC/OLP technology to provide customers with more complete solutions.
During the preparation of the production line, the automotive production process and product complexity are gradually increasing along with the increasing engineering costs. Reducing the installation and commissioning time of the production line and producing qualified products with quality and quantity are becoming the first considerations for automobile manufacturers. In this context, virtual debugging technology came into being.
1 Introduction to virtual commissioning
1.1 Concept of virtual commissioning
Virtual debugging technology is to simulate the performance of on-site hardware such as robots, fixtures, frequency converters, and conveying equipment in the PS software environment before real factory debugging, and verify PLC control logic and robot offline programs. The production cycle can be verified, operators can be trained in the virtual environment, and safety program testing can be carried out before on-site commissioning. The interference area can be verified in the virtual environment, and the probability of on-site collision accidents can be minimized, realizing the transition from the virtual world to the real world. Seamless transitions and connections.
1.2 Virtual commissioning work content
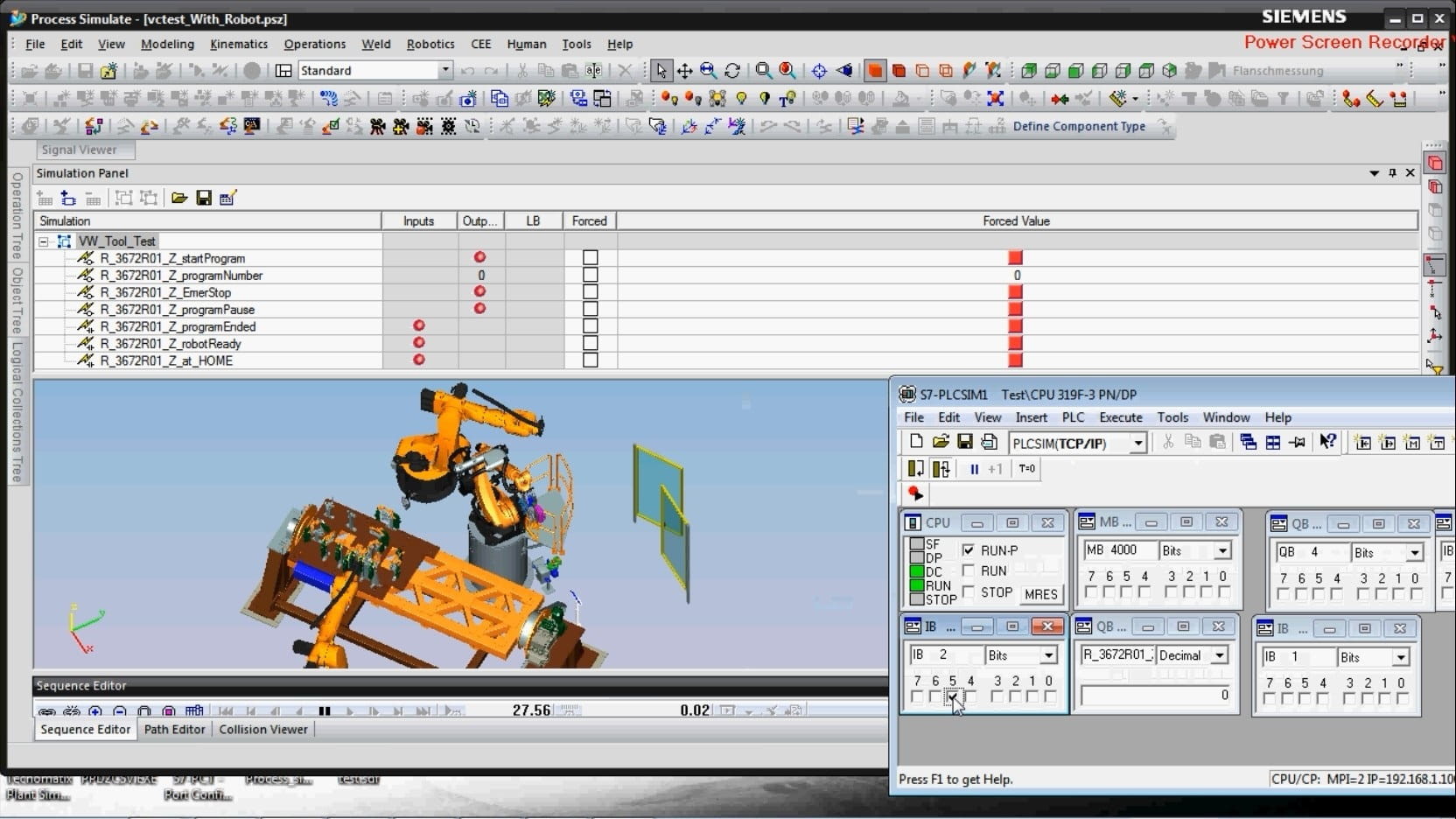
Virtual debugging technology is to complete the joint debugging of PLC program and robot program through the combination of Process Simulate simulation environment and physical PLC, HMI and other automation equipment. The technical process of virtual commissioning is mainly divided into the following steps:
Data transfer → CEE stage → build a virtual debugging environment → point-to-point debugging → single equipment debugging → single-station debugging → joint debugging of stations
(1) Data transfer. The first is to complete the receiving and sorting of simulation data, including importing project simulation data and checking the integrity of the data; checking whether the data meets the requirements, such as data format, organization definition; importing LB standard library and adding control signals; followed by electrical data receiving and Organize, including checking whether the version of the electrical program meets the requirements; import the electrical program, check whether the program structure meets the requirements; organize the signal table: organize the signals that need to be verified during virtual commissioning into a signal table, and the signals need to be classified by equipment type, and output an Excel file.
(2) CEE stage. Work to be done: 1) Build sensors, build various types of sensors according to the design, the naming of the sensors needs to comply with the specifications, and the type and location of the sensors need to be consistent with the electrical drawings; 2) Build the equipment LB, add logic blocks to the equipment, And associate each input and output of the logic block with the corresponding signal; 3) Establish the robot LB, and add interference areas and other commands in the robot path: add logic blocks for each robot, divide the robot interference area, and add related Command; 4) According to the needs of virtual commissioning, establish material flow;
(3) Build a virtual debugging environment. Build a virtual debugging environment so that the PS can communicate with the PLC signal; it is divided into four steps: create a PLCSIM link, download the configuration, add an external connection to the PS, and finally test the signal.
(4) Point-to-point debugging. According to the IO signal table, test whether each signal is correct, and record it in the IO signal table.
(5) Single equipment debugging. The following tasks need to be completed: 1) Test the signal points of each sensor, record the debugging process and output the debugging report; 2) Test the signal points and logic blocks of the turntable, fixture and other equipment, record the debugging process and output the debugging report; 3) PLC interacts with the robot Strictly manage the debugging of signals and robot logic blocks, record the debugging process and output the debugging report;
(6) Single-station debugging. Carry out linkage debugging for each device for a single station, and record the debugging process in the "Summary of Virtual Debugging Problems" table;
(7) Station joint debugging. Perform linkage debugging on multiple stations, and test whether the material flow is correct, and record the debugging process in the "Summary of Virtual Debugging Problems" table.

Product Tags:

|
|
Virtual Commissioning Images
|


